三、机器人运动学
一、运动学与动力学概念
运动学(Kinematics)
研究“运动本身”,不考虑产生运动的力。
主要关注:
- 位置 x
- 速度 v=dtdx
- 加速度 a=dtdv=dt2d2x
机器人运动学(Robot Kinematics)研究机器人关节、连杆之间的几何关系。
- 正运动学(Forward Kinematics, FK):已知关节变量,求末端执行器位姿。
- 逆运动学(Inverse Kinematics, IK):已知末端执行器位姿,求关节变量。
动力学(Dynamics)
研究“力如何产生运动”,依据牛顿第二定律:
F=ma
二、机械手臂的几何结构描述
1. 组成要素
- Link(连杆):刚体,用来连接各关节。
- Joint(关节):提供一个自由度(DOF)。
- 旋转关节(Revolute) → 变量为角度 θ
- 移动关节(Prismatic) → 变量为位移 d
p=[x,y,z]T,R∈SO(3)
2. 编号规则
- Link 0:基座(固定不动)
- Link 1:第一个活动杆
- 以此类推,最后一个为末端执行器。
二、正运动学(Forward Kinematics, FK)
2.1 定义
给定各关节变量,求出末端相对于基座的位姿:
T0n=f(θ1,θ2,…,θn)
其中 T0n 是齐次变换矩阵:
T=[R0p1]
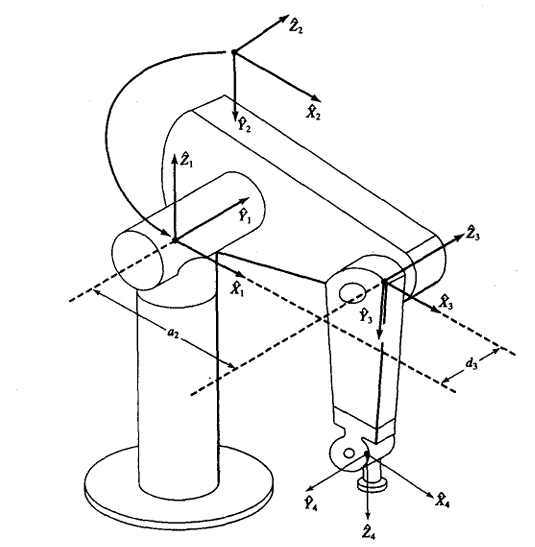
2.2 D–H 参数法(Denavit–Hartenberg)
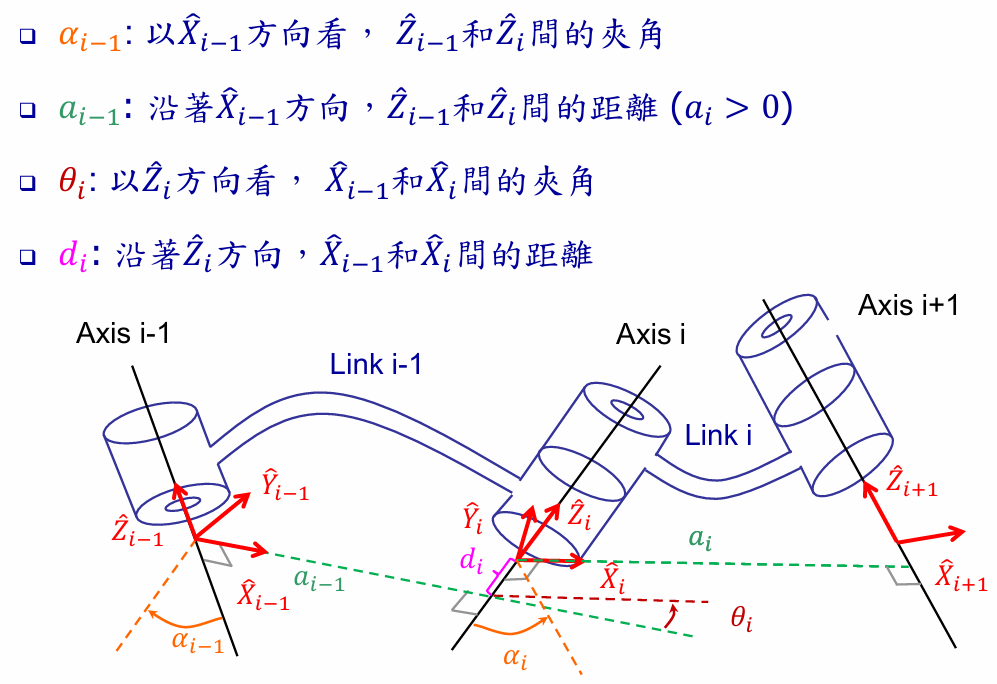
为每个连杆定义 4 个参数:
| 参数 |
含义 |
类型 |
| ai |
连杆长度 |
位移 |
| αi |
连杆扭角 |
旋转 |
| di |
连杆偏距 |
位移 |
| θi |
连杆转角 |
旋转 |
单个连杆的齐次变换(从 i−1 到 i):
Ai=cosθisinθi00−sinθicosαicosθicosαisinαi0sinθisinαi−cosθisinαicosαi0aicosθiaisinθidi1
整体变换为:
T0n=A1A2⋯An
2.3 二维双连杆机械臂示例
已知两关节转角 θ1,θ2,连杆长度 l1,l2,则末端坐标为:
{x=l1cosθ1+l2cos(θ1+θ2)y=l1sinθ1+l2sin(θ1+θ2)
示意图(Mermaid):
flowchart LR
Base[Base]
Base -->|θ1| Link1[Link1]
Link1 -->|θ2| Link2[Link2]
Link2 --> End[End Effector]
三、逆运动学(Inverse Kinematics, IK)
3.1 定义
已知末端位姿 T0n,求各个关节变量:
Given T0n,find θi
3.2 特点
- 非唯一性:可能有多个解(如肘上/肘下姿态)。
- 可能无解:目标点在工作空间之外。
- 高非线性:方程复杂,常需数值迭代法。
3.3 几何法求解(二维双连杆示例)
先求 θ2:
cosθ2=2l1l2x2+y2−l12−l22
θ2=arccos(cosθ2)
再求 θ1:
θ1=atan2(y,x)−atan2(l2sinθ2,;l1+l2cosθ2)
条件:∣cosθ2∣≤1,即目标点在可达范围内。
3.4 数值法(Jacobian 迭代法)
雅可比关系:
x˙=J(θ)θ˙
伪逆求解增量:
θ˙=J+(θ)x˙
迭代更新:
θk+1=θk+ΔtJ+(θk)(xtarget−x(θk))
四、FK 与 IK 对比总结
| 项目 |
正运动学 (FK) |
逆运动学 (IK) |
| 输入 |
关节变量 θi |
末端位姿 T0n |
| 输出 |
末端位姿 T0n |
关节变量 θi |
| 计算难度 |
简单(矩阵乘积) |
复杂(非线性方程) |
| 解的数量 |
唯一 |
多解 / 无解 |
| 应用场景 |
仿真、验证 |
规划、控制 |
五、Q&A
1.正运动学和逆运动学的输入和输出是什么?
正运动学:
1)输入
各个关节变量(旋转角或平移量):
θ1,θ2,…,θn
2)输出
末端执行器的位姿(位置 + 姿态):
T0n=R0p1
其中:
-
位置:末端的坐标 (x,y,z)
-
姿态:末端的方向(用旋转矩阵、欧拉角或四元数表示)
逆运动学:
1)输入
目标末端位姿(期望的目标位置与方向):
Ttarget=Rtarget0ptarget1
2)输出
关节变量:
θ1,θ2,…,θn
2.一个平面两关节机械臂去到同一个目标点,可能会有几种解?为什么?
1)场景:
平面上一个两关节旋转机械臂(2R),每个连杆长度为 l1,l2,目标点为 (x,y)。
2)可能的解
通常有 两种几何解:
- 肘上(elbow-up)构型
- 肘下(elbow-down)构型
这两个解的区别在于第二个关节的弯曲方向不同
3)数学解释
由几何法可得第二关节角度:
cosθ2=2l1l2x2+y2−l12−l22
当 ∣cosθ2∣≤1 时,有两个可能的解:
θ2=arccos(cosθ2)
和
θ2′=−arccos(cosθ2)
这对应两种不同的构型(即“肘上/肘下”)。
3.如果目标点超出了机械臂的最大工作范围,会怎样?
1)最大可达范围
末端与基座的最大、最小距离为:
rmax=l1+l2
rmin=∣l1−l2∣
2)超出范围时
如果目标点 (x,y) 满足:
x2+y2>rmax
或
x2+y2<rmin
则机械臂 无实解(不可达),在计算中会出现:
∣cosθ2∣>1
导致 arccos() 无实数解。
3)物理意义
- 机械臂无法到达目标点。
- 控制系统通常会返回“不可达”或“超出工作空间”错误。
- 在规划算法中会直接排除这些点。
参考