扩散模型
扩散模型(Diffusion Model)零基础·超详细学习笔记
从“完全不懂” → “能完整复述 + 自己推公式”
一、扩散模型到底在解决什么问题?
1.1 生成模型要干的事(最原始版本)
所有生成模型,本质都在做一件事:
学会“真实数据长什么样”,然后自己“造”一个出来
比如图像生成:
- 输入:随机噪声
- 输出:一张“看起来像真的”图片
文件中用一句话概括:
影像生成模型的目标是让「模型生成的数据分布 ≈ 真实数据分布」
1.2 以前的模型为什么难?
| 方法 | 问题 |
|---|---|
| GAN | 训练不稳定、容易崩 |
| VAE | 图像模糊 |
| Autoregressive | 太慢 |
👉 扩散模型的出发点非常“笨”,但极其稳定。
二、扩散模型的“笨办法”:先毁掉,再救回来
2.1 一个反直觉但关键的想法
扩散模型不是直接学“怎么生成图像”,而是:
先把一张真实图片,慢慢“毁掉”成纯噪声
再学“如何一步一步救回来”
课件里反复用这句话强调思想本质 。
2.2 正向过程(Forward Process):加噪声
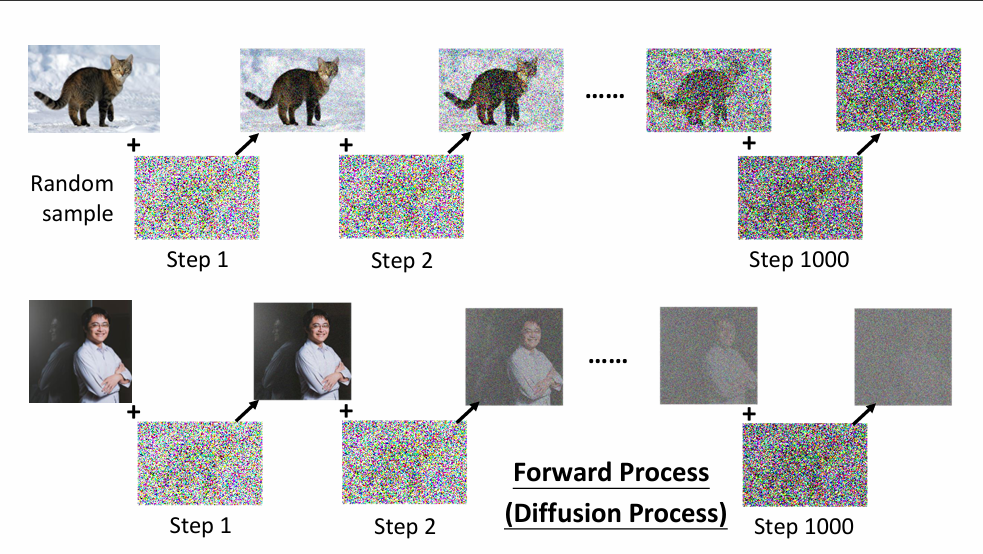
假设你有一张真实图片 。
我们做下面这件事:
- 第 1 步:加一点点噪声 →
- 第 2 步:再加一点 →
- …
- 第 1000 步:几乎变成纯随机噪声 →
⚠️ 这个过程是我们人为设计的,不需要学习
2.3 为什么要“慢慢”加噪声?
如果你一次性把图片变成噪声:
- 模型根本学不会
- 信息完全丢失
慢慢加噪声的好处:
- 每一步只“破坏一点点”
- 反过来“修一点点”是可学习的
三、正向扩散的数学,其实比你想象的简单
3.1 每一步加噪声在做什么?
课件定义:
别怕,我们逐项解释:
- :上一步的图
- :标准高斯噪声(随机)
- :一个很小的数(比如 0.0001)
意思就是:
新图 = 原图 × 一点点 + 噪声 × 一点点
3.2 最重要的一步:可以“一步到位”
这是 扩散模型训练能跑起来的关键:
含义翻译成人话:
不管你要第几步的噪声图,都可以直接从原图算出来
这意味着:
- 不用真的跑 1000 步
- 训练时随便抽一个 t 就行
课件中反复强调这一点 。
四、真正要学的部分:反向过程(去噪)

4.1 模型到底在学什么?
我们已经知道:
- 怎么从 → (加噪)
- 那生成时要做什么?
👉 反过来:从 →
这一步是未知的,需要神经网络学习。
4.1.1 Noise Predicter 模块在扩散模型中的地位
回顾一句核心话:
扩散模型 = 不断调用同一个 Noise Predicter 网络
也就是说:
- 没有 1000 个网络
- 只有一个网络
- 在不同时间步 上反复使用
📌 所以理解 Noise Predicter 模块 = 理解扩散模型本体
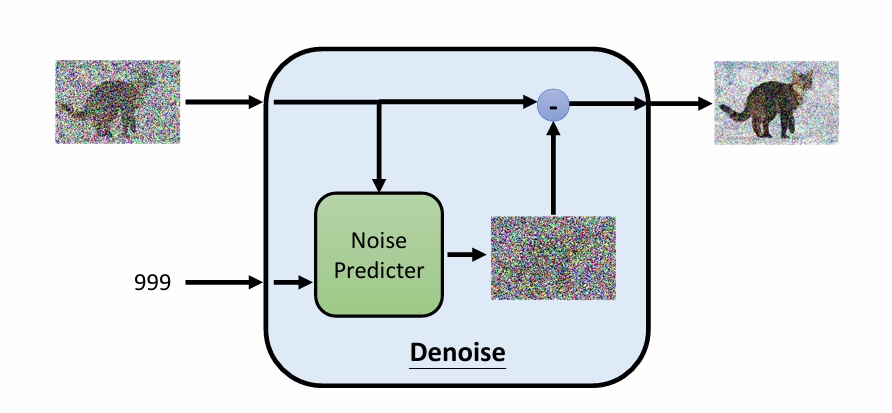
4.1.2 扩散模型中的 Noise Predictor(噪声预测器)
这是扩散模型唯一真正“学习”的模块
Noise Predictor 是一个神经网络,用来预测:在第 t 步中,被加到数据里的那一部分高斯噪声
严格来说,网络预测的是噪声 ε,“去噪”是通过公式计算得到的结果,而不是网络直接输出。
数学上:
这不是命名习惯问题,而是模型本质问题:
- ❌ 它不是“去噪器”
- ❌ 它不直接输出干净样本
- ✅ 它只做一件事:预测噪声
4.2 Noise Predictor 模块的输入 / 输出(极其重要)
4.2.1 输入是什么?
Noise Predictor 网络每一次调用,输入是:
-
当前带噪数据
图像扩散:
Stable Diffusion:latent
-
时间步 t
一个整数(1~T)
但不能直接喂给网络(后面解释)
-
(可选)条件信息
比如 text embedding(Stable Diffusion)
4.2.2 输出是什么?
只输出一件东西:
👉 当前这一步中,被加进去的噪声
形状:
- 和输入图像/latent 一模一样
- 不是标量
- 是一个“噪声图”
⚠️ 非常重要的认知纠正:
- 网络 不是 输出“去噪后的图”
- 网络 不是 输出“干净图像”
- 网络 只负责猜噪声
4.3 时间步 t 是怎么喂给网络的?
4.3.1 为什么 t 不能直接当整数用?
如果你直接输入:
1 | |
问题:
- 神经网络无法理解“532 比 100 更接近 533”
- 离散整数 ≠ 连续信息
4.3.2 时间嵌入(Time Embedding)
扩散模型使用的几乎都是:
Sinusoidal Positional Embedding(和 Transformer 一样)
做法:
- 把 t 映射成一个高维向量
- 包含不同频率的 sin / cos
- 表示“噪声强度阶段”
直觉理解:
网络不是在看“第几步”,而是在看“噪声有多重”
4.4 Denoise 模块的网络结构:U-Net
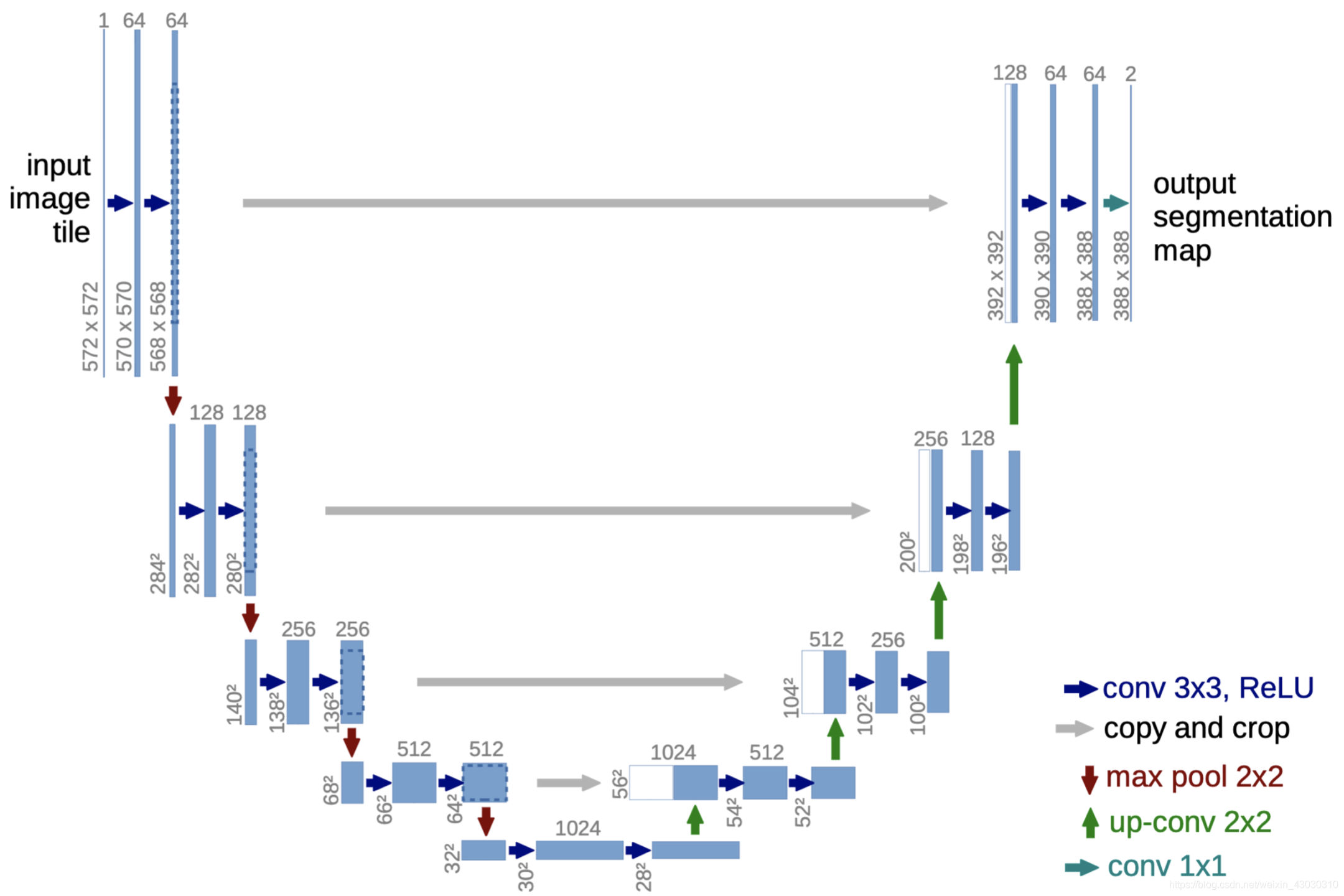
几乎所有扩散模型,都用 U-Net
- 收缩路径( Encoder): U 形的左半部分。
- 扩展路径( Decoder): U 形的右半部分。
- 跳跃连接(Skip Connections): 连接左右两部分的“桥梁”。
4.4.1 为什么是 U-Net?
扩散任务的特点:
- 输入和输出 形状完全一样
- 需要同时:
- 看整体结构(轮廓)
- 看局部细节(纹理)
U-Net 天生满足:
- Encoder:看全局
- Decoder:恢复细节
- Skip Connection:保留空间信息
4.4.2 U-Net 的三大部分
(1)Encoder(下采样)
作用:
- 降分辨率
- 提高感受野
- 理解“这张图整体是什么”
结构:
- Conv → ResBlock → Downsample
- 每降一层,通道数 ↑
(2)Bottleneck(最底层)
作用:
- 信息融合中心
- 最抽象、最全局的表示
在 Stable Diffusion 中:
- Self-Attention / Cross-Attention 就在这里大量使用
- “Attention 主要出现在中低分辨率层,用于全局建模”
(3)Decoder(上采样)
作用:
- 把抽象特征还原成空间结构
- 恢复细节
关键点:
- 和 Encoder 对称
- 每一层都有 Skip Connection
4.4.3 Skip Connection 的真正意义
不是“为了防止梯度消失”这么简单。
在扩散中,Skip Connection 的意义是:
低层保留“哪里有东西”,高层决定“是什么东西”
这对去噪至关重要。
五、训练过程:一步一步“造假题”教模型
5.1 训练数据怎么来?
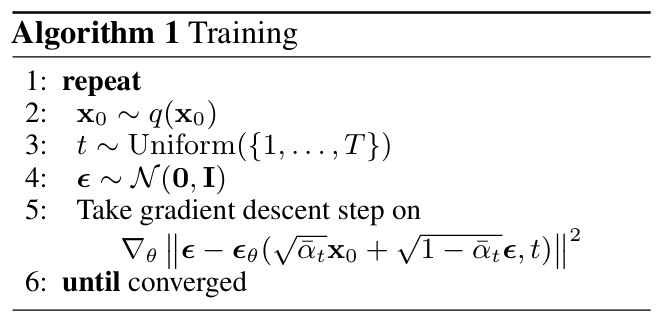
训练时,每一步都在做这件事:
- 随机抽一张真实图片
- 随机抽一个时间步
- 随机生成一个噪声
- 算出
- 把 喂给网络
- 让网络猜
5.2 损失函数居然只是 MSE(均方误差)?
损失函数:
为什么这么简单?
- 这是从最大似然(MLE)严格推导出来的
- 等价于优化 ELBO
- 本质是 Score Matching
👉 看起来像回归,实际上是概率建模
六、生成(Inference):模型是如何“画”图的?
6.1 生成流程
生成时,完全不需要真实图片:
-
从纯噪声 开始
-
for t = T → 1:
- 用网络预测噪声
- 把噪声“减掉一点”
- 得到更干净的图
-
最后得到
6.2 为什么每一步要“随机采样”?
-
如果只取 Gaussian 的均值
-
所有样本都会变得很像
-
多样性消失
DDIM / deterministic sampler 可以去掉随机性
但牺牲多样性换速度
这和语言模型:
- greedy decoding
- beam search 崩坏
是同一个问题 。
Diffusion Model(DDPM)推导讲义
0. 问题设定
我们的目标是学习一个生成模型,使其能够从随机噪声中采样出服从真实数据分布 的样本。
直接建模复杂高维分布 非常困难,因此扩散模型采用了一种 “先破坏、再修复” 的策略。
1. 正向扩散过程(Forward Process)
我们人为定义一个逐步加噪的马尔可夫链:
其中:
- 为预先设定的噪声调度
- 每一步仅加入少量高斯噪声
- 正向过程 不需要学习
2. 一步到位采样公式(关键)
定义:
🔹
👉 定义每一步“还保留多少原图信息”
- :这一小步丢多少信息
- :这一小步保留多少信息
🔹
👉 定义“到第 t 步为止,还剩多少原始信号”
这是一个累计量:
- 第 1 步保留
- 第 2 步再乘
- …
- 第 t 步乘完,剩下
📌 所以:
从 传到 的“信号衰减系数”
可以证明,任意时刻 都可以直接由原始样本 采样得到:
重要意义:
- 训练时无需真的执行 步扩散
- 可以随机采样任意时间步
- 这是扩散模型可训练的核心原因
3. 反向过程建模(Reverse Process)
正向过程已知,而反向过程 是未知的。
我们用参数化高斯分布近似真实反向分布:
学习的关键在于 如何建模均值 。
4. 为什么预测噪声是最优选择(核心推导)
由第 2 节的一步到位公式,可以反解得到:
这表明:
如果我们能够准确预测噪声 ,就可以恢复出原始数据 。
因此,我们令神经网络学习一个 噪声预测器:
5. 反向均值的显式形式
将噪声预测器代入反向过程,可得反向均值的闭式表达:
关键理解:
- 神经网络仅预测噪声
- “去噪”并非网络直接输出,而是通过公式计算得到
6. 训练目标函数
扩散模型的训练目标源自最大似然估计(MLE),通过 ELBO 推导可化简为:
该损失函数形式为 MSE,但其本质是:
- 变分推断
- Score Matching
- 概率密度梯度学习
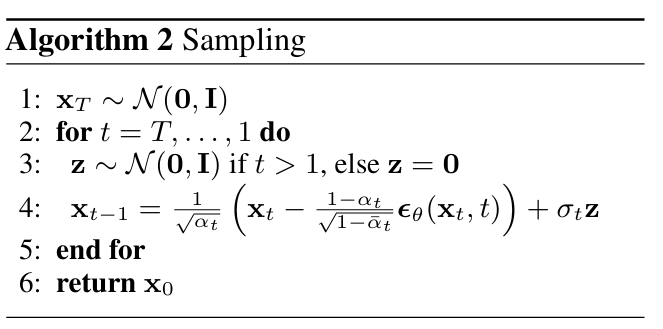
7. 生成(Inference / Sampling)
生成阶段不需要真实样本:
初始化
逐步反向采样
得到最终样本
随机项保证了生成样本的多样性;若去除随机项,即得到 DDIM 等确定性采样方法。
8. 总结
扩散模型通过逐步修正噪声分布,实现了对复杂数据分布的建模:
扩散模型不是直接生成样本,
而是在反复逼近真实数据分布的 score。