三大经典模型学习笔记 AI 三大经典模型学习笔记 ——BERT · 深度强化学习 · 扩散模型 (参考:李沐、王树森、李宏毅课程) 1. BERT 模型实战(李沐) 1.1 背景与核心思想 概览与动机 BERT(Bidirectional Encoder Representations from Transformers)是用大量未标注语料通过自监督学习预训练出通用语言表示的模型。 目标:学习上下文敏感的 2025-10-23 具身智能基础 #大模型 #深度学习 #VLA
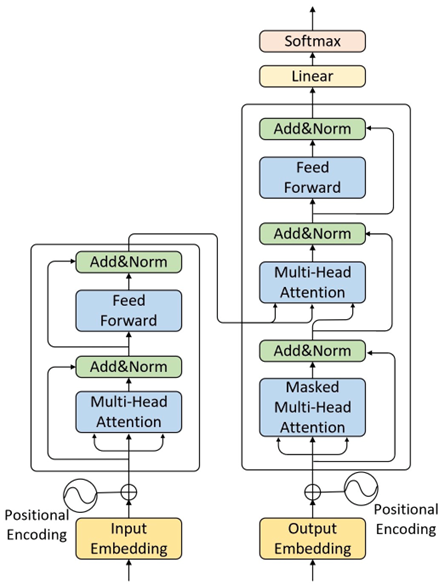
自注意力机制与Transformer(二) 自注意力机制与Transformer(二) 1.编码器(Encoder) 把输入序列(如词向量序列)编码成一组上下文相关的特征向量,供解码器使用。 一个 Encoder 由 N 层(通常为 6 层) 堆叠而成。 每一层包含两个子层: 多头自注意力层(Multi-Head Self-Attention) 前馈全连接层(Feed Forward Network) 每个子层都有: 残差连 2025-10-17 具身智能基础 #大模型 #深度学习 #VLA
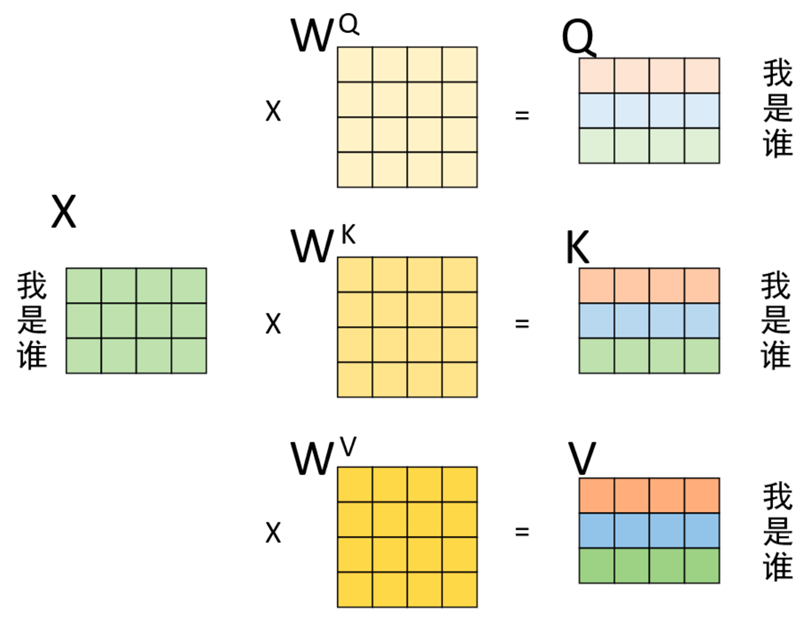
自注意力机制与Transformer 自注意力机制与Transformer 1.自注意力机制 1.1自注意力机制的提出 由于传统的 RNN-based Encoder-Decoder 架构在建模过程中,下一个时刻的计算过程会依赖于上一个时刻的输出,而这种固有的属性就限制了传统的Encoder-Decoder 模型不能以并行的方式进行计算。 在Seq2Seq任务中,源输入序列的不同部分通常都具有不同的重要性,然而传统RNN-based 2025-10-15 具身智能基础 #大模型 #深度学习 #VLA
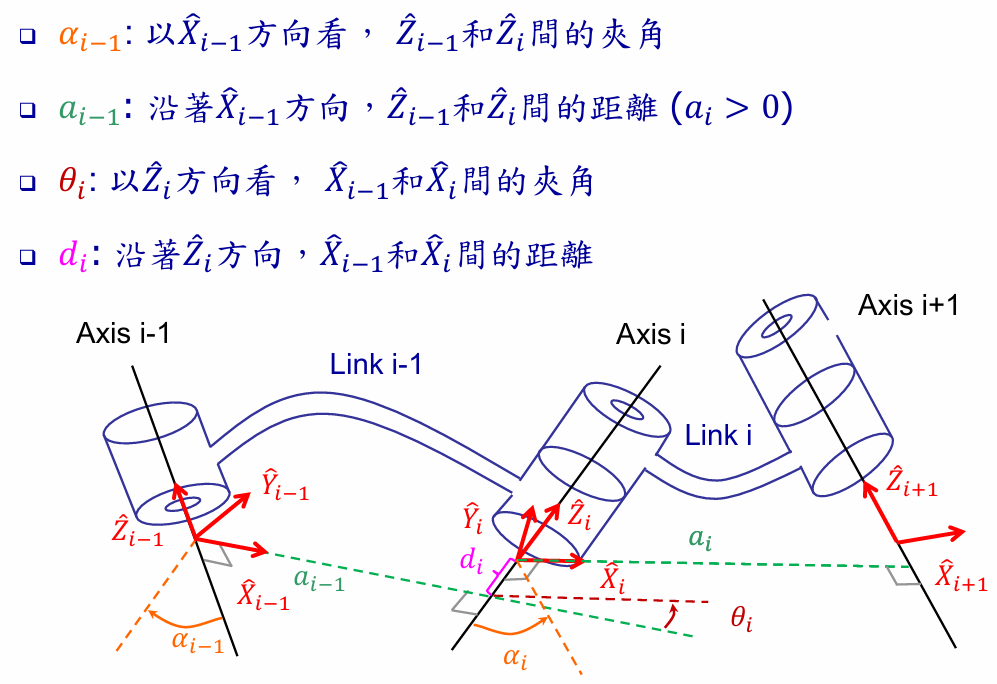
三、机器人运动学 三、机器人运动学 一、运动学与动力学概念 运动学(Kinematics) 研究“运动本身”,不考虑产生运动的力。 主要关注: 位置 x\mathbf{x}x 速度 v=dxdt\mathbf{v} = \dfrac{d\mathbf{x}}{dt}v=dtdx 加速度 a=dvdt=d2xdt2\mathbf{a} = \dfrac{d\mathbf{v}}{dt} = \dfrac{d^2\ 2025-10-09 具身智能基础 #机器人学
C++提高编程 C++提高编程 本阶段主要针对C++==泛型编程==和==STL==技术做详细讲解,探讨C++更深层的使用 1 模板 1.1 模板的概念 模板就是建立通用的模具,大大提高复用性 例如生活中的模板 一寸照片模板: PPT模板: 模板的特点: 模板不可以直接使用,它只是一个框架 模板的通用并不是万能的 1.2 函数模板 C++另一种编程思想称为 ==泛型编程== ,主要利用的技术就是 2025-10-09 C++ #C++
C++核心编程 C++核心编程 本阶段主要针对C++==面向对象==编程技术做详细讲解,探讨C++中的核心和精髓。 1 内存分区模型 C++程序在执行时,将内存大方向划分为4个区域 代码区:存放函数体的二进制代码,由操作系统进行管理的 全局区:存放全局变量和静态变量以及常量 栈区:由编译器自动分配释放, 存放函数的参数值,局部变量等 堆区:由程序员分配和释放,若程序员不释放,程序结束时由操作系统回收 内存四区 2025-10-09 C++ #C++
C++基础入门 C++基础入门 1 C++初识 1.1 第一个C++程序 编写一个C++程序总共分为4个步骤 创建项目 创建文件 编写代码 运行程序 1.1.1 创建项目 Visual Studio是我们用来编写C++程序的主要工具,我们先将它打开 1.1.2 创建文件 右键源文件,选择添加->新建项 给C++文件起个名称,然后点击添加即可。 1.1.3 编写代码 123456789101 2025-10-09 C++ #C++
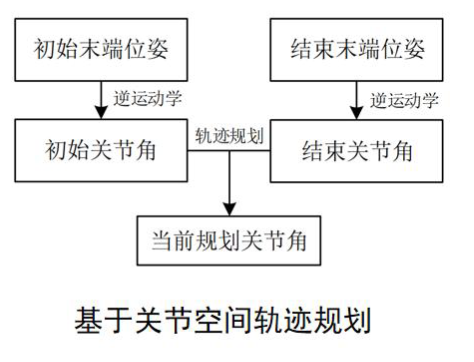
二、机器人轨迹规划 二、机器人轨迹规划 机器人轨迹规划是机器人运动控制中的关键环节,旨在为机器人在工作空间中的移动设计一条平滑且有效的路径。无论是工业领域中的机械臂,还是服务型机器人,都需要精准的轨迹规划以确保任务的高效完成。 1. 定义 机器人轨迹规划(Trajectory Planning)是指: 在满足机器人运动学、动力学约束和任务需求的条件下,为机器人从 起点状态 到 目标状态 生成一条 连续、平滑、可执行的 2025-10-03 具身智能基础 #机器人学 #轨迹规划
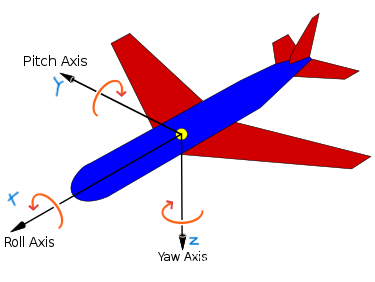
一、坐标系与位姿变换 一、坐标系与位姿变换 1.坐标系 为了描述机器人本身的位置和姿态,必须构建坐标系来描述机器人的状态(世界坐标系、机体坐标系)。 在平面内一般包含2个移动自由度(x轴、y轴)及1个转动自由度(平面内绕某点)。 在空间中一般包含3个移动自由度(x轴、y轴、z轴)及3个转动自由度(绕x轴、y轴、z轴)。 2.移动 平移描述的是物体在空间中位置的变化,即物体在某个方向上移动而不改变其形状和姿态。这种 2025-10-01 具身智能基础 #机器人学